市場快訊AI Mobility / AI / autonomous vehicles / robotaxi3 分鐘閱讀
NVIDIA 把自駕 AI 開源到 32B:企業要看的不是炫技,是驗證流程
NVIDIA 在 GTC Taipei 發表 Alpamayo 2 Super。ALTOS LAB 讀到的重點不是「模型變大」,而是自駕 AI 正把驗證、模擬與部署變成同一條產品線。
Cover image: Source image: NVIDIA / GlobeNewswire · source-attributed
本文重點
- NVIDIA 發表 32B Alpamayo 2 Super,主打自駕場景的推理、規劃與行動能力。
- AlpaGym、OmniDreams 與 NuRec 顯示自駕開發正往閉環模擬與驗證前進。
- ALTOS LAB 建議企業先補驗證流程與責任邊界,再擴大高風險 AI 自動化。
NVIDIA 在 GTC Taipei 發表 Alpamayo 2 Super,把自駕車 AI 推到 32B 開放式推理模型。這則消息真正值得企業注意的,不是參數變大,而是自駕開發開始把「看見、推理、模擬、訓練、上車」接成一條更完整的產品線。
發生什麼:自駕模型開始走向閉環訓練
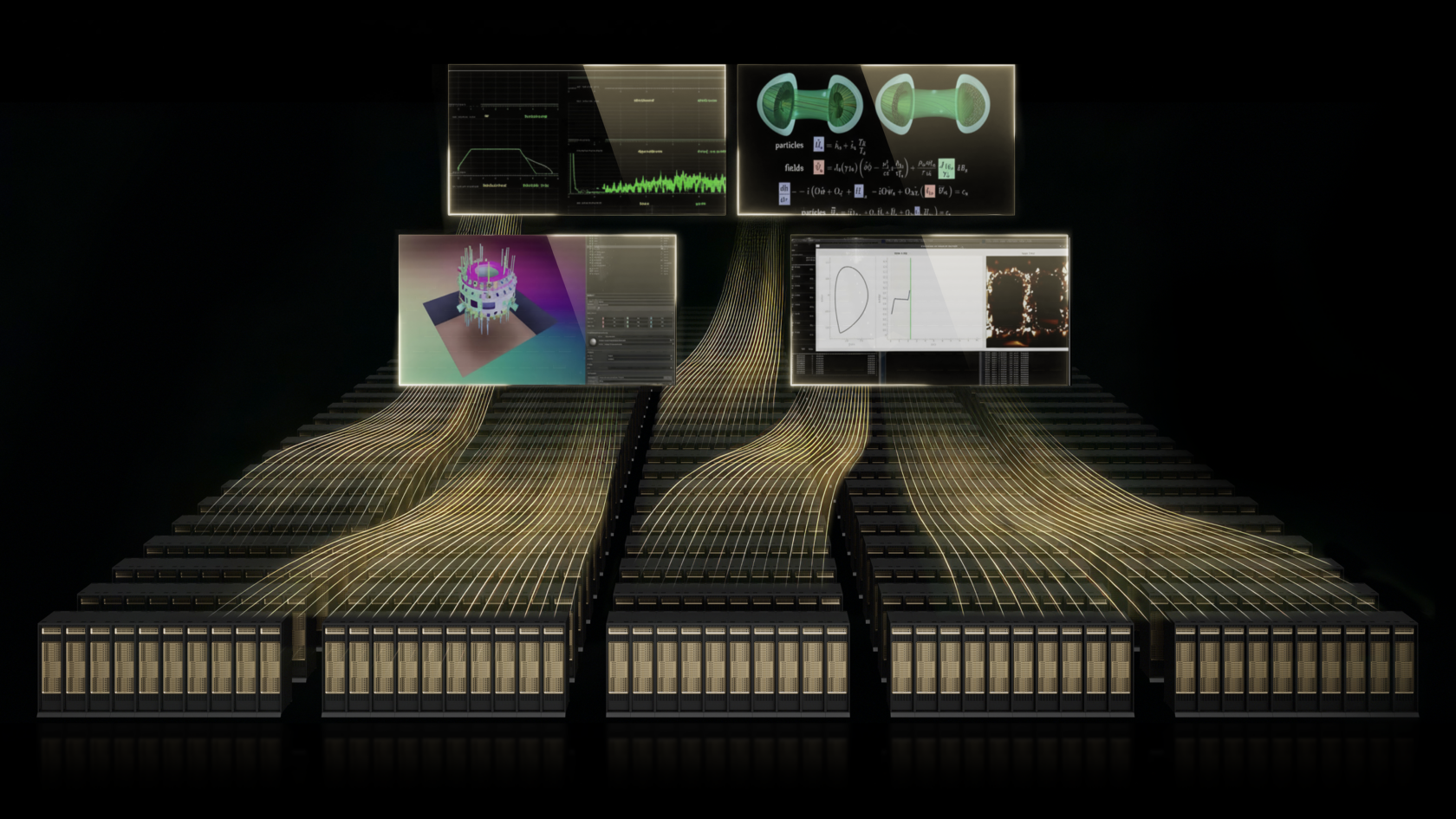
根據 NVIDIA 公告,Alpamayo 2 Super 是 32B 的 vision-language-action 模型,目標是支援 Level 4 robotaxi 開發。它不只產生軌跡,也強調 reasoning、scene understanding、auto-labeling、model critiquing,以及把大型 teacher model 蒸餾到車載平台的能力。
同一波更新還包含 AlpaGym、OmniDreams 與 Omniverse NuRec。AlpaGym 用閉環強化學習讓模型在模擬中面對自己決策造成的後果;OmniDreams 生成罕見與長尾駕駛場景;NuRec 則把真實車隊資料重建成可用於模擬的 3D 場景。
市場訊號:自駕 AI 的競爭點移到驗證
NVIDIA 執行長 Jensen Huang 在公告中把 Alpamayo 描述成讓車「開始安全推理,而不只是駕駛」的時刻。ALTOS LAB 會把這句話翻成企業語言:如果 AI 系統要處理真實世界決策,團隊不能只問模型能不能做出答案,還要問答案如何被驗證、如何被解釋、如何在失敗時退回。
自駕 AI 的下一個門檻,不是單次 demo,而是可重複的閉環驗證流程。
對企業的意思:先補模擬與責任邊界
不是每家公司都會做 robotaxi,但這則消息對所有正在導入 AI Agent、物理 AI 或高風險自動化的團隊都有提醒。當模型開始控制更多行動,驗證不能只停在離線測試。團隊需要設計能重放情境、觀察後果、記錄判斷理由、標示人工介入點的流程。
本週可以先檢查四件事:哪些決策會造成真實後果;哪些場景目前只能靠人工想像;哪些失敗案例需要被重放;哪些模型輸出必須能被人理解。這些問題比「要不要換更大的模型」更早決定專案能不能上線。
來源與參考
- NVIDIA Launches Alpamayo 2 Super Open Reasoning Model for Robotaxis
NVIDIA introduced Alpamayo 2 Super, a 32B open reasoning VLA model for level 4 robotaxi development, alongside AlpaGym, OmniDreams and Omniverse NuRec agent skills.
- How to Post-Train Autonomous Vehicle Models in Closed-Loop with NVIDIA Alpamayo
NVIDIA explains closed-loop reinforcement learning with AlpaGym and Alpamayo recipes, showing how AV models can be trained against the consequences of their driving decisions.
- NVIDIA Alpamayo: Open AI for Robotaxis and Autonomous Vehicles
NVIDIA positions Alpamayo as an open portfolio of models, simulation frameworks and datasets for robotaxi and autonomous vehicle development.
FAQ
常見問題
Alpamayo 2 Super 是什麼?
它是 NVIDIA 發表的 32B 開放式 vision-language-action 推理模型,目標是支援 Level 4 robotaxi 與自駕系統開發。
這跟一般企業有什麼關係?
重點不只在自駕,而是高風險 AI 系統如何做閉環測試、模擬長尾場景、記錄推理與建立人工介入邊界。
Ken
ALTOS LAB 研究與工程編輯,聚焦 AI Agent、資料流程、審核機制與產品化風險。